


A mezőgazdaságban az utóbbi években forradalmi változásokat hozott a drónok és a távérzékelés alkalmazása. Ezek a technológiák lehetővé teszik a termőföldek gyors, pontos és költséghatékony megfigyelését. A gazdálkodók valós időben nyomon követhetik a növények fejlődését, és a begyűjtött adatok segítségével megalapozott döntéseket hozhatnak – legyen szó tápanyag-utánpótlásról, öntözésről vagy növényvédelemről.
A drónok (UAV, Unmanned Aerial Vehicles) és a műholdas rendszerek együttesen képesek lefedni a helyi és a nagyobb térségi megfigyelések igényeit, így alapvető szerepük van a precíziós mezőgazdaságban.

A drónok szerepe a mezőgazdaságban
A drón kifejezés olyan pilóta nélküli repülőeszközt jelöl, amelyet távirányítással vagy önállóan, előre programozott útvonal mentén irányítanak. Az UAS (Unmanned Aerial System) a teljes rendszert jelenti – magát a drónt, a vezérlőegységet és az adatátviteli kapcsolatot.
A drónok előnyei közé tartozik a gyors bevethetőség, a részletes megfigyelés és a precíz adatgyűjtés. Segítségükkel hatékonyan felmérhető a növényállomány állapota, a talajviszonyok, valamint a hozamot befolyásoló tényezők.
Dróntípusok és felhasználásuk
‑ Forgószárnyas drónok: többrotoros eszközök, amelyek jól manőverezhetők és alkalmasak kisebb területek részletes vizsgálatára, például növényállapot-felmérésre, gyomdetektálásra.
‑ Merevszárnyú drónok: hosszabb repülési idővel rendelkeznek, ezért nagyobb területek feltérképezésére ideálisak.
‑ Hibrid modellek (VTOL): ötvözik a két típus előnyeit, függőleges fel- és leszállásra is képesek, így nehezen megközelíthető helyeken is használhatók.
A modern mezőgazdaságban egyre elterjedtebbek a drónrajok, amelyek összehangoltan dolgoznak nagy területeken, növelve a hatékonyságot például vetésellenőrzés, növényvédelem vagy hozambecslés során.
Monitoring drónok szerepe
A monitoring drónok fejlett szenzorokkal, képfeldolgozó technológiákkal és kommunikációs rendszerekkel vannak felszerelve, melyek valós idejű adatgyűjtést és elemzést tesznek lehetővé. Segítségükkel gyorsan, nagy területen gyűjthetőek képi adatok, amelyekből digitális képfeldolgozási technikákkal értékes információ nyerhető.
E módszerek alkalmazása révén térképezhető a gyomnövények eloszlása, valamint elemezhető a kultúrnövény-gyom arány, ami alapja lehet a célzott, differenciált beavatkozásoknak. A drónok által rögzített RGB, multispektrális és hőkamerás felvételek a növényállomány egészségét, víz- és tápanyagellátottságát is értékelhetővé teszik.
A gépi látás algoritmusok (például spektrális indexek, képszegmentáció és gépi tanulás) lehetővé teszik, hogy a gyomosodás mértéke és helye automatikusan meghatározható legyen.
Drónokban használt szenzorok
‑ RGB kamerák: hagyományos színes képeket készítenek (az emberi látástartománya), amelyek a növényzet általános állapotát mutatják.
‑ Multispektrális kamerák: a növények fényvisszaverését különböző hullámhosszakon mérik, így kiszámítható például az NDVI-index.
‑ Hiperspektrális kamerák: részletes spektrális információt adnak, így alkalmasak tápanyaghiány és betegségek pontos azonosítására.
‑ Hőkamerák: a felszíni hőmérsékletet mérik, segítve a vízhiányos területek felismerését.
‑ LiDAR-szenzorok: háromdimenziós térképet készítenek a növényállományról és a domborzatról.
Saját fejlesztésű drónalapú gyomtérképező rendszer
A Széchenyi István Egyetem Albert Kázmér Mosonmagyaróvári Karának kutatói egy innovatív rendszert fejlesztettek ki, amelyben egy UAV (pilóta nélküli légijármű) végzi a gyomosodás feltérképezését.
Az UAV egy ABZ Innovation M12 típusú, négymotoros, multifunkcionális drón (1. kép; 1. táblázat), amelyet egy Raspberry Pi 4 alapú fedélzeti számítási egységgel láttak el, mobilkommunikációs (4G/5G) kapcsolattal. Ennek köszönhetően a drón távolról, valós időben is vezérelhető.

A rendszer célja a gyomfoltok automatikus felismerése. A drón a kameraképen felismeri a gyomfoltokat, majd a terület koordinátáit továbbítja egy szervernek, ahol a koordináták segítségével térkép készíthető a terület gyomosodásának mértékéről.
Képfeldolgozás és gépi látás
A drónba integrált RGB kamera a talajra merőlegesen van irányítva és a repülés közben rögzített videóképet valós időben továbbítja a földi vezérlőegységhez, ahol gépi látás algoritmus elemzi a képeket. A cél a szántóföldi gyomfoltok színalapú azonosítása, amihez az RGB képet átalakítják a feldolgozást elősegítő HSV (Hue-Saturation-Value) tartományba:
‑ Hue (szín): a domináns színárnyalat (pl. zöld, barna, lila),
‑ Saturation (telítettség): a szín élénksége,
‑ Value (fényesség): a világosság mértéke.
A program ezután színtartomány-szűrést végez, amely során csak a gyomokra jellemző zöld árnyalatokat hagyja meg, a többi pixelt feketére színezi. Az így létrejött maszkon az algoritmus kontúrkereséssel felismeri és kirajzolja a gyomfoltokat (2. kép).
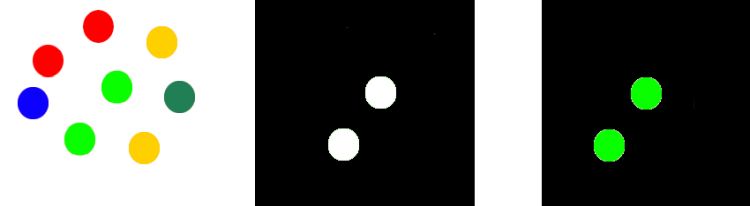
A folyamat lépései:
1. Színtér-átalakítás RGB → HSV.
2. Színtartomány megadása (pl. zöld spektrum).
3. Maszk létrehozása (fehér = gyom, fekete = háttér).
4. Kontúrkeresés és gyomfolt körberajzolása.
5. A foltok GPS-koordinátáinak továbbítása a földi egységnek.
Kommunikáció az UAV és földi egység között
A drón által detektált gyomfolt koordinátáit VPN-hálózaton keresztül küldi el a földi egységnek. A VPN (Virtual Private Network) egy olyan technológia, amely lehetővé teszi, hogy az interneten keresztül biztonságosan csatlakozzunk egy másik hálózathoz, így az adataink védve haladnak a külső világ felé. Az üzeneteket MQTT-protokollon keresztül továbbítja a földi egységnek. Az MQTT (Message Queuing Telemetry Transport) egy kommunikációs protokoll.
Lényege, hogy kis adatcsomagokat küld a felhasználók és eszközök között, minimális sávszélességet igényelve, így nagyon energiatakarékos és gyors. Az MQTT három fő elemből áll:
‑ Broker: a központi szerver, ami fogadja és továbbítja az üzeneteket, ‑ Publisher: az üzenetküldő (itt az UAV),
‑ Subscriber: a feliratkozó (a földi egység).
A VPN és az MQTT kombinálása biztosítja a biztonságos és megbízható adatátvitelt.
Az UAV elküldi az aktuális detektált gyomfolt hosszúsági-szélességi koordinátát, amit a földi egység azonnal megkap további elemzés céljából.
Ezzel a rendszerrel a megfigyelés és a beavatkozás teljesen automatizálttá válik, emberi jelenlét nélkül is.
Valós eredmények és továbbfejlesztési lehetőségek
A valós kísérletekben a drón megbízhatóan azonosította a gyomfoltokat és sikeresen továbbította a helyadatokat (3. kép).

A jövőbeli fejlesztések célja:
‑az algoritmus fényviszony-kompenzációja, hogy automatikusan alkalmazkodjon a napszakhoz és az időjáráshoz,
‑az automatizált foltpermetezés megvalósítása, amely során a monitoring drón által készített kijuttatási térképet egy permeteződrón használja differenciált növényvédőszer-kijuttatásra.
Ez a fejlesztés jól példázza, hogyan válik a távérzékelés, robotika és mesterséges intelligencia ötvözésével a precíziós mezőgazdaság még hatékonyabbá és fenntarthatóbbá.
Összegzés és jövőkép
A dróntechnológia ma már nem csak a megfigyelés, hanem az aktív beavatkozás eszköze is. A monitoring és permetező drónok, valamint az UGV-k együttműködésén alapuló rendszerek új szintre emelik a mezőgazdasági folyamatok automatizálását. A jövőben az ilyen intelligens, összekapcsolt rendszerek képesek lesznek önállóan felismerni, elemezni és kezelni a problémás területeket – akár foltpermetezéssel, akár célzott mintavételezéssel.
A cél egyértelmű: fenntartható, adatvezérelt és automatizált mezőgazdaság, amely egyszerre szolgálja a gazdaságosságot és a környezet védelmét.
Köszönetnyilvánítás
A kutatómunkát a „Precíziós Bio-Műszaki Kutatócsoport” végezte, amelyet a „Széchenyi István Egyetemért Alapítvány Kuratóriuma” és az 5G MPN AgriTech HUB in Hungary (azonosító: 101094871) projekt támogatott.
Szerző: Dr. Ambrus Bálint, Horváth Koppány • Széchenyi István Egyetem, Albert Kázmér Mosonmagyaróvári Kar, Bioműszaki és Precíziós Technológiai Tanszék, Mosonmagyaróvár
MezőHír Tudástár: Drónos gyomtérképezés – A drónokra szerelt kamerák és gépi látás algoritmusok valós időben ismerik fel a gyomfoltokat, így pontos térképek készülnek a differenciált növényvédelmi beavatkozáshoz.

